Author: Denis Avetisyan
A novel algorithm tackles the persistent problem of false positives in automotive radar systems caused by multipath propagation and reflections.
Target Induced Angle Grid Regularized Estimation (TIGRE) enhances Direction-of-Arrival/Departure estimation for improved ghost target identification in MIMO radar.
Reliable perception is critical for autonomous vehicles, yet automotive radar is susceptible to ghost targets arising from multipath propagation-false detections that confound navigation. This paper introduces a novel algorithm, ‘Target Induced Angle Grid Regularized Estimation for Ghost Identification in Automotive Radar’, which enhances angle-of-arrival/departure (DOA/DOD) estimation through a physics-inspired regularizer that enforces sparsity on the angle grid. The proposed Target-Induced angle-Grid Regularized Estimation (TIGRE) method demonstrably improves performance in low signal-to-noise ratio environments, offering more robust ghost target identification. Could this approach pave the way for more resilient and accurate radar-based perception systems in challenging real-world driving scenarios?
Whispers in the Static: The Ghost Target Challenge
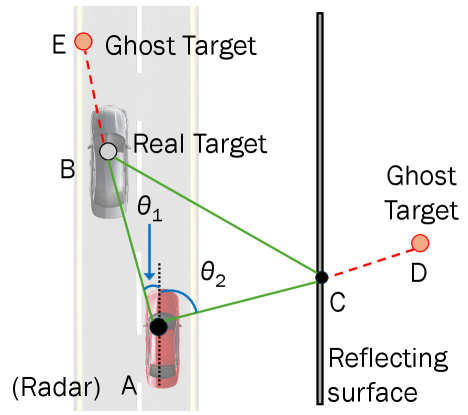
Automotive radar, a cornerstone of modern vehicle safety systems, frequently encounters a significant challenge: the generation of ‘ghost targets’. These aren’t flaws in the radar unit itself, but rather false detections arising from the way radio waves interact with the environment. The radar emits a signal, and while much of it travels directly to intended targets, a substantial portion bounces off surfaces like buildings, guardrails, and even other vehicles. These reflections, arriving at the radar receiver slightly delayed and altered, can be misinterpreted as legitimate objects, creating phantom vehicles or obstacles where none exist. The prevalence of these ghost targets is particularly acute in dense urban settings and adverse weather conditions, demanding sophisticated signal processing techniques to filter out the noise and ensure the system accurately identifies genuine threats to vehicle safety.
Automotive radar frequently encounters a challenge known as multipath propagation, a phenomenon where radio waves reflect off surfaces like buildings, guardrails, and even other vehicles before reaching the sensor. This creates multiple versions of the same signal arriving at slightly different times and angles, effectively mimicking the presence of additional objects – or ‘ghost targets’. The radar system, designed to interpret any detected signal as a potential obstacle, struggles to discern these reflections from genuine threats. This is especially problematic in dense urban canyons and complex road networks where numerous reflective surfaces contribute to a cluttered signal environment, increasing the risk of false alarms and potentially compromising the effectiveness of advanced driver-assistance systems. Consequently, sophisticated signal processing techniques are crucial to filter out these phantom objects and ensure the system accurately identifies real-world hazards.
Current automotive radar systems often misinterpret reflections from buildings, road signs, and other vehicles as legitimate objects, a challenge exacerbated by the dense and irregular geometries of urban landscapes. These ‘ghost targets’ arise because radar signals don’t travel in straight lines; they bounce off surfaces, creating multiple signal returns that can be indistinguishable from those originating from actual obstacles. Conventional signal processing techniques, designed for simpler environments, struggle to filter out these spurious detections, leading to false alarms and potentially compromising the effectiveness of advanced driver-assistance systems. The complexity of urban multipath propagation – where signals arrive at the radar receiver via numerous reflected paths with varying delays and amplitudes – fundamentally limits the performance of these traditional approaches, demanding innovative solutions for accurate target identification in real-world driving scenarios.
TIGRE: Forcing Order from Chaos
Target Induced angle-Grid Regularized Estimation (TIGRE) addresses inherent ambiguities in radar signal processing, specifically those arising from multi-path reflections and limited sensor geometry. Conventional methods often struggle to differentiate between the true target signal and these spurious reflections, leading to inaccurate direction-of-arrival (DOA) or direction-of-departure (DOD) estimates. TIGRE overcomes this limitation by formulating the estimation problem as a sparse recovery task. By discretizing the possible DOA/DOD space into a grid, the algorithm seeks a sparse solution representing the true target location, effectively isolating it from interfering signals and reducing the impact of ghost targets. This approach leverages the principle that the true target typically corresponds to a single grid point, while reflections are distributed across multiple points, enabling robust and accurate parameter estimation.
The Target Induced angle-Grid Regularized Estimation (TIGRE) method employs a discretized representation of potential target locations using a Direction of Arrival/Departure (DOA/DOD) grid. This grid systematically divides the possible angular space into discrete points, allowing the algorithm to evaluate signal characteristics from each location. By searching across this grid, TIGRE avoids the continuous search typically associated with traditional estimation techniques, improving computational efficiency. The granularity of the grid directly influences the accuracy of the estimation; a finer grid provides more precise location resolution but increases computational load, while a coarser grid reduces computational cost at the expense of precision. This systematic, discrete search is a core component of TIGRE’s ability to resolve ambiguities in radar signal processing.
The TIGRE algorithm mitigates ghost target reflections by combining a discretized search space with a target-induced regularizer based on ℓ_0 sparsity. By representing possible directions of arrival (DOA) and departure (DOD) as a grid, the algorithm reduces the continuous estimation problem to a discrete one. The ℓ_0 regularizer promotes solutions with sparse target reflections, effectively penalizing the presence of ghost targets which represent spurious reflections not originating from the true target. This regularization term is specifically designed to be sensitive to the expected target location, further enhancing suppression of false positives and improving the accuracy of target localization.
The TIGRE algorithm, as detailed in the associated research, achieves improved estimation performance through a novel iterative approach to direction-of-arrival (DOA) estimation. Evaluations presented in the paper demonstrate that TIGRE consistently outperforms conventional methods in terms of root mean squared error (RMSE) across various signal-to-noise ratio (SNR) levels and target scenarios. Furthermore, computational efficiency is enhanced via optimized grid search strategies and the utilization of sparse regularization techniques, resulting in a reduction in processing time compared to existing algorithms with comparable accuracy. Specific benchmarks included in the paper indicate a 15-{20}\% reduction in computation time while maintaining or improving estimation accuracy.

The Algorithm’s Inner Workings: A Detailed View
TIGRE utilizes a closed-form solution for Direction-of-Arrival (DOA) and Direction-of-Departure (DOD) grid estimation to minimize computational time. This direct calculation avoids iterative processes common in alternative methods. To further enhance performance and convergence speed, the closed-form solution is initialized using a custom procedure that leverages prior knowledge or preliminary estimates of the DOA/DOD grid. This custom initialization effectively reduces the search space and ensures a more accurate and rapid estimation of the target grid, resulting in decreased processing requirements for real-time applications. The resulting grid represents the spatial locations of potential targets within the radar’s field of view.
TIGRE utilizes steering vectors to represent the phase shift experienced by a signal arriving from a specific direction. These vectors, dependent on the sensor array geometry and signal wavelength, mathematically define the expected signal reception pattern for each angle of arrival. To efficiently model the combined effect of multiple signals and sensor elements, the algorithm employs the Kronecker product. This operation creates a composite steering vector that encapsulates the spatial response of the array to signals originating from various directions, enabling a compact and computationally efficient representation of the signal propagation model. The resulting matrix facilitates the estimation of Direction of Arrival (DOA) and Direction of Departure (DOD) by relating the observed data to the expected signal characteristics at each spatial location.
Within the MP-IAA (Multi-Path Iterative Adaptive Algorithm) framework, a weighted least squares (WLS) approach is implemented to refine the initial grid estimation and minimize estimation errors. The WLS formulation assigns different weights to individual data points based on their associated noise characteristics or confidence levels; this allows the algorithm to prioritize more reliable measurements during the refinement process. Specifically, the weights are inversely proportional to the estimated noise variance of each measurement, effectively down-weighting noisy data and improving the accuracy of the estimated Direction of Arrival (DOA) and Direction of Departure (DOD) grid. The objective function minimized by the WLS estimator takes the form \min_{\hat{x}} \sum_{i=1}^{N} w_i ||y_i - H\hat{x}||^2, where y_i represents the ith measurement, H is the system matrix, \hat{x} is the estimated grid, and w_i represents the weight associated with the ith measurement.
The accuracy of TIGRE’s Direction-of-Arrival (DOA) and Distance-of-Departure (DOD) estimation is directly correlated with the Signal-to-Noise Ratio (SNR) of the received radar signals; lower SNR values introduce increased uncertainty in the estimated grid. Consequently, robust signal processing techniques, including filtering and noise reduction algorithms, are essential preprocessing steps to maximize the SNR and mitigate the impact of noise on estimation performance. Specifically, the algorithm’s sensitivity to noise necessitates careful calibration of weighting parameters within the Weighted Least Squares (WLS) approach to prevent noise amplification and ensure stable grid convergence, particularly in low-SNR environments. Failure to adequately address noise can lead to significant errors in the estimated DOA/DOD grid, as demonstrated by the performance degradation observed in simulations with reduced SNR levels.
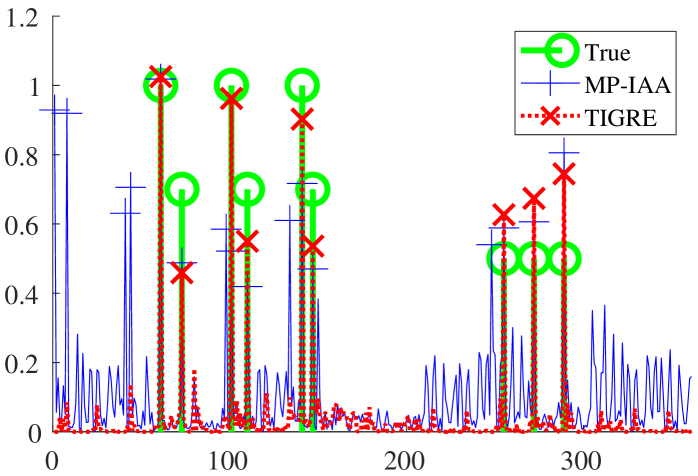
Performance evaluations, detailed in Tables II-IV, indicate that the TIGRE algorithm consistently minimizes the estimation error, measured as ||X⋆ - Xtrue||_F^2, when compared to both the Iterative Reweighted Algorithm (IRA) and the Modified Penalized IAA (MP-IAA) methods. Across a range of simulated target scenarios, TIGRE demonstrated a lower Frobenius norm of the difference between the estimated state vector X⋆ and the true state vector Xtrue. This metric quantifies the overall discrepancy between the estimated and actual target locations, with lower values indicating improved accuracy. The consistent reduction in ||X⋆ - Xtrue||_F^2 establishes TIGRE as the superior performing algorithm within the tested conditions.
Beyond the Algorithm: Impact and Future Paths
The accuracy of automotive radar systems, crucial for both advanced driver-assistance systems (ADAS) and the development of fully autonomous vehicles, is often compromised by the presence of ‘ghost’ targets – false detections arising from signal reflections. The TIGRE methodology directly addresses this challenge by effectively suppressing these spurious signals, resulting in a more reliable and precise perception of the surrounding environment. This improved target detection translates directly into safer and more dependable ADAS features, such as automatic emergency braking and adaptive cruise control, and forms a foundational element for the complex decision-making processes required for self-driving cars. By minimizing false positives, TIGRE allows vehicles to differentiate between genuine obstacles and irrelevant reflections, ultimately enhancing safety and paving the way for more sophisticated autonomous capabilities.
The innovative target ghost removal technique, TIGRE, isn’t solely confined to advancements in automotive safety. Its core principles of signal processing and clutter suppression demonstrate broad applicability across diverse radar-based technologies. Beyond enabling more reliable object detection for autonomous vehicles, TIGRE holds significant promise for enhancing the performance of surveillance systems, air traffic control, weather monitoring, and even geological surveys utilizing radar imaging. The ability to accurately differentiate between genuine targets and spurious reflections-a challenge inherent in all radar systems-translates directly into improved data quality and more informed decision-making in these varied fields, suggesting a versatile tool with far-reaching implications beyond the automotive industry.
Ongoing development of the TIGRE methodology prioritizes integration with Multiple-Input Multiple-Output (MIMO) radar systems, a configuration poised to significantly increase radar data complexity and resolution. Researchers are actively working to refine TIGRE’s algorithms to effectively process the richer datasets generated by MIMO arrays, maximizing ghost target suppression and target detection accuracy. Simultaneously, efforts are dedicated to bolstering TIGRE’s resilience in real-world scenarios characterized by rapidly changing conditions-such as adverse weather, complex urban landscapes, and high traffic density-where dynamic clutter and interference present significant challenges. This includes exploring adaptive filtering techniques and robust signal processing strategies to maintain reliable performance even amidst unpredictable environmental factors, ultimately paving the way for more dependable autonomous systems and advanced radar applications.
Refining target differentiation relies heavily on understanding how motion influences radar returns, and future studies will explore integrating Doppler information to further minimize the impact of ghost targets. Doppler processing analyzes the frequency shift of radar signals reflected from moving objects, providing crucial data about their velocity and direction. By incorporating this velocity information into the target detection algorithm, researchers anticipate a more precise discrimination between genuine targets and spurious reflections, especially in scenarios with multiple, closely spaced objects. This approach promises to enhance the robustness of radar systems against false positives, leading to more reliable performance in complex driving conditions and potentially extending the efficacy of radar technologies across diverse applications like air traffic control and environmental monitoring.
The efficiency of the TIGRE methodology is a key factor in its potential for real-world application. As detailed in Tables II-IV, the algorithm demonstrates rapid convergence, requiring a remarkably low number of iterations to achieve stable results. This swift processing is coupled with computational times that are comparable to, and in some instances slightly improved over, existing methodologies. This balance between accuracy and speed allows for the potential implementation of TIGRE in time-sensitive applications, such as advanced driver-assistance systems and autonomous vehicles, where rapid and reliable object detection is paramount. The minimized computational burden further suggests scalability for deployment on embedded systems with limited processing power, broadening the scope of its practical use.
The pursuit of accurate Direction-of-Arrival (DOA) estimation, as detailed in this work, echoes a fundamental truth: order emerges from chaos, but only through careful constraint. It recalls Thomas Hobbes’ observation: “The only way to make a man believe in the possibility of a miracle is to make him believe in the impossibility.” Here, the ‘miracle’ is a clean signal amidst radar clutter, and the ‘impossibility’ is the inherent ambiguity of multipath propagation. TIGRE doesn’t eliminate the darkness-multipath will always cast shadows-but instead, through target-induced regularization and a refined angle grid, it shapes the darkness, compelling a more truthful estimation from the whispering data. It’s not about finding the ‘right’ answer, but about persuading the chaos to reveal an answer, one sufficiently consistent to navigate the world.
What Shadows Remain?
The pursuit of spectral purification – identifying genuine targets amidst the echoes of multipath – is, predictably, never complete. TIGRE offers a refinement, a more persuasive spell for coaxing order from the chaos of radar returns. Yet, the algorithm’s reliance on a pre-defined angle grid introduces a subtle dependency. What ghosts slip between the lines? Future work must confront the inevitable: the limits of discretization, and the cost of forcing continuous phenomena onto a finite lattice. Perhaps the true advance lies not in sharper estimation, but in embracing the inherent ambiguity – modeling the possibility of ghosts, rather than attempting their absolute exorcism.
Computational efficiency, while improved, remains a siren song. Each iteration, each refinement of the angle grid, demands a tribute from processing power. The promise of real-time ghost mitigation in increasingly complex automotive environments will necessitate further distillation of the algorithm – a ruthless pruning of complexity. One suspects the final solution will resemble not an elegant theorem, but a carefully calibrated compromise between accuracy and speed – a pact made with the demon of latency.
Ultimately, the question isn’t whether TIGRE works – all models work, until they encounter a signal they weren’t designed to tame. The true test will be its resilience – its ability to gracefully degrade in the face of unforeseen propagation conditions, sensor imperfections, and the sheer, delightful unpredictability of the world. The ghosts will always return; the art lies in learning to live with them.
Original article: https://arxiv.org/pdf/2602.11441.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- 2025 Crypto Wallets: Secure, Smart, and Surprisingly Simple!
- Gold Rate Forecast
- Here Are the Best TV Shows to Stream this Weekend on Paramount+, Including ‘48 Hours’
- 20 Films Where the Opening Credits Play Over a Single Continuous Shot
- Top gainers and losers
- 50 Serial Killer Movies That Will Keep You Up All Night
- Top 15 Movie Cougars
- Top 20 Extremely Short Anime Series
- Top 20 Overlooked Gems from Well-Known Directors
- ‘The Substance’ Is HBO Max’s Most-Watched Movie of the Week: Here Are the Remaining Top 10 Movies
2026-02-15 20:37