Author: Denis Avetisyan
A new approach to autonomous racing focuses on directly incorporating track-specific vehicle dynamics into trajectory optimization, achieving faster lap times through iterative learning.
This paper introduces a track-centric iterative learning framework leveraging wavelet parameterization and Bayesian Optimization to refine global trajectory optimization for autonomous racing vehicles.
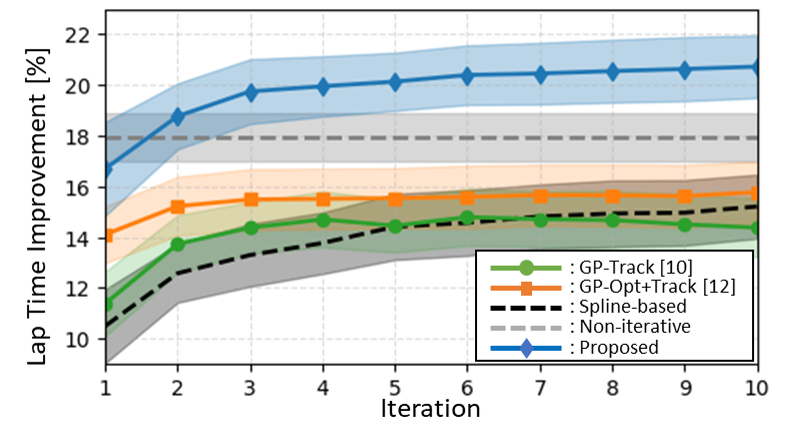
Achieving globally optimal trajectories in autonomous racing remains challenging due to computational expense and uncertainties in vehicle dynamics. This paper, ‘Track-centric Iterative Learning for Global Trajectory Optimization in Autonomous Racing’, introduces a novel framework that directly learns and optimizes full-horizon trajectories by iteratively refining them with track-specific dynamics. Utilizing wavelet parameterization and Bayesian optimization, the approach learns residual dynamics from real-world data and integrates them into the trajectory optimization process, resulting in significant lap time improvements-up to 20.7% over baseline methods. Could this track-centric learning paradigm unlock new levels of performance and robustness in autonomous systems beyond the racing domain?
The Inevitable Algorithm: Speed as a Systemic Property
Autonomous racing distinguishes itself from other robotic challenges through the sheer demand for speed and adaptability. Unlike industrial automation or warehouse logistics, a racing environment presents a constantly shifting landscape of variables – unpredictable track surfaces, evolving grip conditions, and the dynamic positioning of competitors. Achieving optimal performance isn’t simply about completing a task, but doing so at the absolute limit of physical possibility, requiring algorithms to make split-second decisions under immense pressure. This necessitates a departure from pre-programmed behaviors; instead, systems must continuously sense, predict, and react to a highly variable and competitive setting, pushing the boundaries of real-time control and machine learning in a way few other fields can match.
Achieving victory in autonomous racing hinges on an unwavering command of vehicle dynamics and a capacity to exploit every nuance of a challenging circuit. Success isn’t simply about completing laps; it requires operating consistently at the absolute threshold of performance, demanding pinpoint accuracy in steering, throttle control, and braking. This pursuit necessitates more than just reacting to the track; the vehicle must proactively anticipate changes in terrain, optimize its trajectory through corners, and maintain stability under extreme g-forces. The difference between a winning run and a spin-out often comes down to fractions of a second, making precise control and relentless optimization paramount for autonomous racing systems striving to reach their full potential.
Conventional motion planning algorithms, while effective in static environments, frequently encounter limitations when applied to the fast-paced, unpredictable nature of autonomous racing. These methods often rely on computationally intensive processes – meticulously calculating optimal trajectories based on predefined maps and vehicle dynamics. The sheer volume of calculations required to continuously replan in real-time, coupled with the need to account for dynamic track conditions like changing grip or unexpected obstacles, can overwhelm onboard processing capabilities. Furthermore, these traditional approaches typically struggle to generalize to subtle track variations or unforeseen circumstances, demanding extensive manual tuning and limiting adaptability – a critical disadvantage when fractions of a second separate victory from defeat.
To overcome the limitations of conventional motion planning in autonomous racing, researchers are increasingly focused on developing systems capable of learning and predicting vehicle dynamics with greater efficiency. These approaches move beyond pre-programmed trajectories, instead leveraging machine learning – particularly reinforcement learning and model predictive control – to allow vehicles to adapt in real-time. By training on vast datasets of driving data or through simulated environments, algorithms can learn complex relationships between control inputs, vehicle state, and track conditions. This predictive capability is crucial for anticipating future states, optimizing control actions, and maintaining precision at high speeds, ultimately enabling autonomous racecars to navigate dynamic tracks and compete effectively without relying on explicit, pre-defined paths. The goal is to create a system that not only reacts to current conditions but proactively anticipates and responds to the ever-changing racing environment.
The Ghost in the Machine: Data as the Foundation of Prediction
Data-driven methods are essential for constructing accurate vehicle dynamics models because they directly address the inherent complexities of real-world vehicle behavior. Traditional physics-based models often rely on simplifying assumptions that introduce errors when applied to actual driving conditions. Data-driven approaches, conversely, leverage large datasets collected from vehicle sensors – including accelerometers, gyroscopes, and wheel speed sensors – to learn the relationships between driver inputs, vehicle states, and resulting motion. This learning process captures complex interactions between vehicle subsystems – such as tire slip, aerodynamic forces, and suspension dynamics – that are difficult to model analytically. Furthermore, data-driven techniques enable the quantification and compensation of residual dynamics, representing the discrepancy between the model’s predictions and the observed vehicle behavior, thus improving the overall fidelity and predictive capability of the model.
The Bicycle Model represents vehicle dynamics as a simplified two-wheeled system, allowing for efficient calculation of key kinematic and dynamic states. This model utilizes only two primary degrees of freedom – lateral and yaw – to approximate vehicle motion. Enhancing this model with a Frenet Frame coordinate system – defined by a tangent and normal axis aligned with the vehicle’s path – facilitates accurate representation of forces and moments acting on the vehicle relative to its intended trajectory. Specifically, the Frenet Frame decomposes velocities and accelerations into longitudinal and lateral components, enabling precise calculation of tire forces and slip angles, critical parameters for predicting vehicle behavior. This combination allows for computationally efficient simulations while retaining sufficient fidelity for many control and estimation applications.
Residual dynamics represent the discrepancy between a vehicle dynamics model’s predictions and actual vehicle behavior observed through empirical data. This difference arises from unmodeled factors such as tire relaxation length, aerodynamic nuances, suspension complexities, and road surface irregularities. Quantifying residual dynamics is crucial for enhancing model accuracy; techniques include analyzing the error between predicted and measured states – position, velocity, orientation – and employing statistical methods to characterize the distribution of these errors. Addressing residual dynamics often involves refining the model with additional parameters, implementing advanced estimation techniques like Kalman filtering, or developing error compensation strategies to minimize the impact of unmodeled effects on prediction outcomes. Ignoring these residual dynamics leads to compounding errors, particularly in predictive control and trajectory planning applications.
A Track-Centric Surrogate Model is developed by leveraging data collected during vehicle operation on a specific racing circuit. This model functions as a computationally efficient approximation of the full vehicle dynamics, trained to predict vehicle states – such as position, velocity, and orientation – based on driver inputs and track geometry. The training data incorporates telemetry from instrumented vehicles, capturing the nuances of tire grip, aerodynamic forces, and suspension behavior unique to that track. By focusing on a single circuit, the model avoids the generalization errors inherent in global vehicle dynamics models and achieves higher fidelity predictions for lap time optimization, racing line prediction, and autonomous driving applications. This localized approach enables real-time performance evaluation and control strategies tailored to the specific characteristics of each racing circuit.
The Algorithm Ascendant: Orchestrating Speed Through Prediction
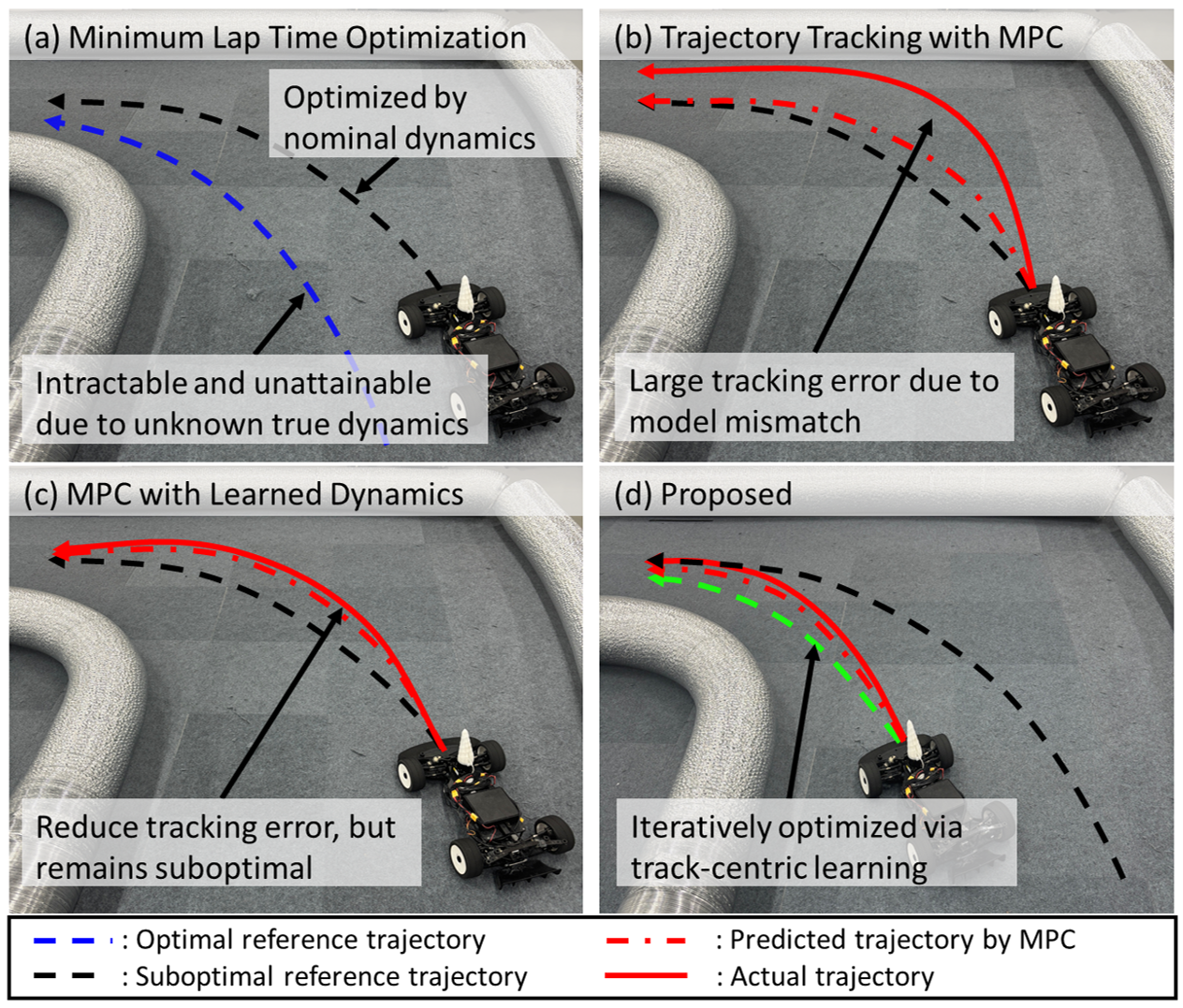
Trajectory optimization is the core process by which autonomous racing vehicles minimize lap times. This involves mathematically defining a path-the trajectory-and then iteratively refining its parameters, such as steering angle, acceleration, and braking points, to achieve the fastest possible completion of a circuit. The process accounts for vehicle dynamics, track geometry, and constraints like tire friction and maximum acceleration. Successful trajectory optimization necessitates a robust cost function that accurately represents the desired outcome-minimizing lap time-and an efficient optimization algorithm capable of navigating the high-dimensional parameter space to identify the optimal trajectory. The resulting trajectory dictates the reference inputs for low-level control systems, directly influencing vehicle speed and position throughout the race.
Spline parameterization and wavelet-based parameterization are commonly employed techniques for trajectory representation in autonomous racing due to their ability to define smooth, continuous paths. Spline parameterization utilizes piecewise polynomial functions – typically cubic splines – defined by a series of control points to represent the trajectory. Wavelet-based parameterization, conversely, decomposes the trajectory into a sum of wavelets, allowing for compact representation and efficient modification of trajectory shape. Both methods offer flexibility in adjusting trajectory characteristics such as position, velocity, and acceleration through manipulation of their respective parameters – control point locations for splines and wavelet coefficients. This parameterization facilitates optimization algorithms in searching for trajectories that minimize lap time while respecting vehicle dynamics and track boundaries. The choice between the two often depends on computational cost and the desired level of detail in trajectory representation.
Full-horizon optimization in autonomous racing involves planning a trajectory for the entire lap duration, rather than optimizing for individual segments or short time windows. This approach enables strategic decision-making, such as trading speed in one corner for a more advantageous position entering the next, or minimizing overall lap time by considering the cumulative effect of actions across the entire course. By evaluating the complete lap, the optimization algorithm can identify and exploit long-term dependencies and synergies that would be missed by local optimization methods. This global perspective is crucial for maximizing overall performance, as it allows the system to account for factors like energy consumption, tire wear, and track position throughout the race.
Bayesian Optimization (BO) efficiently searches the parameter space for optimal trajectory configurations by constructing a probabilistic surrogate model – the Track-Centric Surrogate Model – of the lap time. This model estimates lap time performance based on a limited number of evaluated trajectory parameters, avoiding computationally expensive full simulations for every candidate. BO balances exploration – sampling in uncertain regions of the parameter space – with exploitation – refining parameters near predicted optima – using an acquisition function. This process iteratively refines the surrogate model and identifies parameter sets likely to yield faster lap times with fewer evaluations compared to methods like grid search or random sampling. The Track-Centric approach focuses the surrogate model on track geometry, improving prediction accuracy and reducing the dimensionality of the optimization problem.

The Perpetual Machine: An Ecosystem of Continuous Refinement
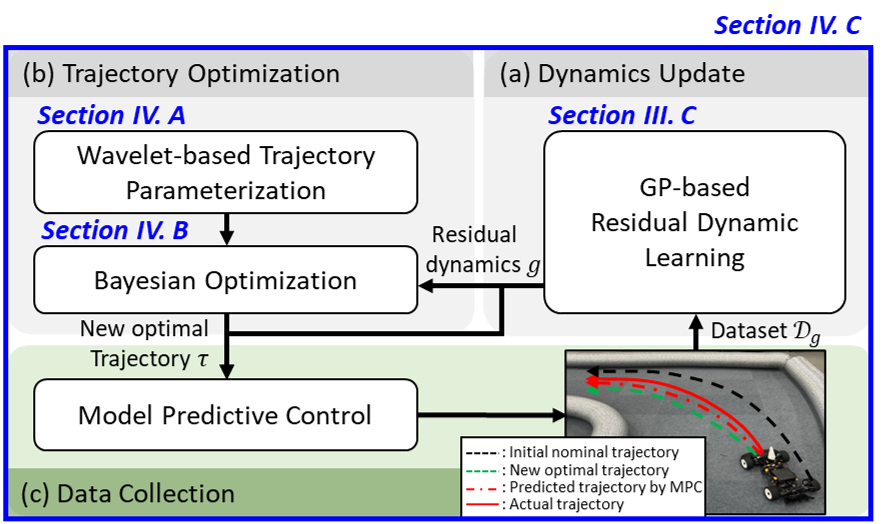
The core of this advancement lies within an Iterative Learning Framework, a system designed for perpetual refinement. This framework doesn’t simply execute a pre-programmed strategy; instead, it operates as a continuous cycle of data acquisition, model adaptation, and optimization. Performance data gathered from each lap is meticulously analyzed, informing adjustments to the vehicle dynamics model – essentially, the system’s understanding of how the car behaves. These refined models then drive the generation of improved trajectories, promising faster and more efficient paths around the track. Crucially, this isn’t a one-time calibration; the process repeats endlessly, allowing the autonomous vehicle to progressively learn from its experiences and consistently enhance its performance, ultimately enabling it to transcend the limitations of static programming and achieve sustained gains in speed and precision.
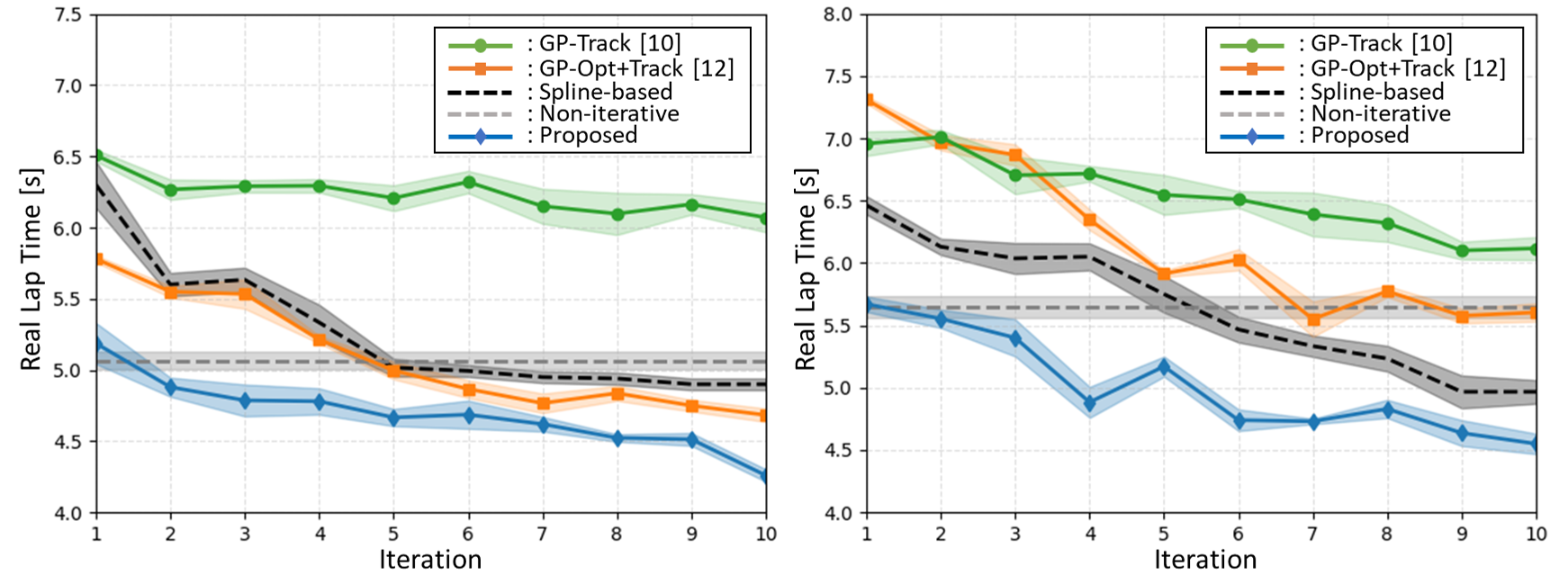
The system’s core strength lies in a cyclical process of data acquisition, model refinement, and trajectory optimization. During on-track operation, the vehicle continuously gathers performance data – encompassing speed, steering angles, and acceleration – which is then fed back into a sophisticated vehicle dynamics model. This model isn’t static; it’s continually updated and improved based on the observed real-world performance, allowing it to more accurately predict vehicle behavior. Subsequently, optimization algorithms leverage this refined model to generate improved trajectories, seeking to minimize lap times and maximize efficiency. This iterative loop – observe, refine, optimize – enables the system to progressively learn the nuances of the racing environment and consistently enhance its performance with each successive lap, pushing the boundaries of autonomous racing capabilities.
The system’s capacity for sustained performance gains stems from a continuous learning process that mitigates the impact of unpredictable track conditions. Rather than relying on a static model, the framework actively collects data during each performance iteration, identifying discrepancies between predicted and actual vehicle behavior. This information is then used to refine the underlying vehicle dynamics model, improving its accuracy and predictive power. Consequently, the system doesn’t merely execute pre-programmed trajectories; it dynamically adapts to subtle changes in the track surface, grip levels, or even environmental factors like temperature. This iterative refinement of both the model and the resulting trajectories allows for consistent improvement over time, ultimately enabling the autonomous vehicle to overcome track variations and achieve increasingly optimized performance with each lap.
The development of this iterative learning framework demonstrates a significant leap towards autonomous racing capabilities, ultimately enabling vehicles to exceed the performance of even seasoned human drivers. Through continuous on-track data acquisition and model refinement, the system consistently optimizes its trajectory, resulting in an observed average lap time improvement of 20.7% across a diverse range of racing scenarios. This advancement isn’t merely about matching human skill; it signifies a potential for autonomous vehicles to establish new benchmarks in speed and efficiency, driven by a capacity for data-driven adaptation beyond the limits of human reaction and consistency. The implications extend beyond the racetrack, suggesting a pathway toward more sophisticated and adaptable autonomous systems in various dynamic environments.
The pursuit of optimized trajectories, as detailed in this work, echoes a fundamental truth about complex systems. It isn’t about imposing control, but about fostering adaptation. Every carefully constructed wavelet parameterization, every iteration of Bayesian Optimization, is merely a seed planted in the track’s unique environment. As Claude Shannon observed, “The most important thing in communication is to convey the meaning, not the message.” Similarly, this research isn’t solely about achieving faster lap times; it’s about enabling the vehicle to understand the track’s nuances, learning to interpret the ‘message’ of the road itself. The system, given time, will begin fixing itself, adjusting to the imperfections and peculiarities inherent in any real-world circuit.
What Lies Around the Next Bend?
This work, predictably, clarifies the limits of generalization. Track-centric learning doesn’t solve the problem of autonomous racing; it relocates it. Each circuit becomes a new, painstakingly calibrated microcosm. The system doesn’t learn to race; it memorizes a particular apocalypse. The wavelet parameterization, while elegant, merely delays the inevitable fragmentation of the state space as new tracks demand bespoke adaptations. One suspects the true cost isn’t computational, but organizational – the accruing weight of track-specific knowledge.
The framing of residual dynamics as the core of transfer learning feels… optimistic. It’s a bandage on a fundamental fracture. The vehicle, after all, isn’t merely reacting to forces; it’s embedded within a complex, chaotic system. Future work will inevitably grapple with the non-stationarity of the track itself – changes in grip, weather, even the subtle evolution of the racing line as tires lay down rubber. Attempts to model this with increasingly sophisticated Bayesian Optimization will likely yield diminishing returns.
Perhaps the fruitful direction isn’t improved prediction, but radical simplification. To abandon the pursuit of a globally optimal trajectory and instead embrace a reactive, embodied intelligence – a system that doesn’t plan a perfect lap, but responds to the present moment. A system that accepts, rather than resists, the inherent unpredictability of the race. It’s a less ambitious vision, certainly. But also, possibly, a more sustainable one.
Original article: https://arxiv.org/pdf/2601.21027.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- 20 Movies Where the Black Villain Was Secretly the Most Popular Character
- Transformers Under the Microscope: What Graph Neural Networks Reveal
- Celebs Who Narrowly Escaped The 9/11 Attacks
- Silver Rate Forecast
- Trading on Thin Air: AI Agents Conquer Crypto Volatility
- Gold Rate Forecast
- Invincible Season 4 Gender Swaps Tech Jacket As Fans Question Major Comic Change
- Every Notable ‘Star Trek: The Original Series’ Actor Who Died
- 22 Films Where the White Protagonist Is Canonically the Sidekick to a Black Lead
- Trading Smarter: AI-Powered Execution Schedules
2026-02-02 06:06