Author: Denis Avetisyan
Researchers are leveraging the power of artificial intelligence to create more accurate and nuanced simulations of how people move within urban environments.

This paper introduces Generative Traffic Agents (GTA), a novel approach combining large language models with agent-based traffic simulation to generate population-grounded mobility behaviors for improved urban planning and mobility innovation.
Predicting human mobility patterns at scale remains a challenge due to the complexity of individual choices and the limitations of traditional, rule-based simulation. This paper introduces ‘GTA: Generative Traffic Agents for Simulating Realistic Mobility Behavior’, a novel approach leveraging large language models to create realistic, population-grounded agents capable of simulating transportation choices. By generating artificial populations from sociodemographic data, GTA enables scalable, context-sensitive simulations without relying on handcrafted assumptions. Could this agent-based modeling paradigm unlock more effective evaluation of future urban innovations and policies?
The Illusion of Rationality: Deconstructing Traditional Traffic Modeling
Conventional traffic simulations frequently operate on the premise of rational actors, assuming drivers consistently optimize for speed or shortest routes, and react identically to given stimuli. However, this simplification overlooks the inherent variability of human behavior – the distractions, emotional states, and individual preferences that significantly influence driving decisions. Consequently, these models often fail to accurately predict real-world traffic patterns, particularly in complex scenarios like merging, yielding, or responding to unexpected events. The resulting inaccuracies can have substantial ramifications for urban planning, infrastructure design, and the development of autonomous vehicle systems, as strategies based on flawed simulations may prove ineffective or even dangerous when implemented in the dynamic environment of actual roadways.
Current agent-based modeling techniques, while offering improvements over macroscopic traffic simulations, frequently fall short in replicating the complexities of human travel behavior. These models often treat agents as homogenous entities responding solely to immediate stimuli – such as distance or traffic density – neglecting the multifaceted motivations that drive individual choices. A driver’s decision isn’t simply about reaching a destination; it’s influenced by factors like appointment schedules, risk aversion, personal preferences for routes, or even spontaneous decisions based on perceived congestion. Existing ABM frameworks struggle to incorporate this diversity, typically relying on pre-defined behavioral rules that lack the adaptability to account for varied contextual responses – a sudden detour due to roadwork, a change of plans triggered by a phone call, or simply the inclination to choose a more scenic route. Consequently, the simulations often produce unrealistic or overly generalized mobility patterns, hindering their effectiveness for applications like urban planning and the development of truly autonomous vehicles.
The increasing complexity of modern urban environments demands mobility simulations that move beyond theoretical projections and embrace realistic, interpretable modeling. Traditional methods struggle to accurately represent the intricate dance of human behavior within transportation networks, hindering effective urban planning and the safe deployment of autonomous vehicles. A growing need exists for simulations capable of predicting not just where people will travel, but why, and how they will respond to unforeseen circumstances – from traffic congestion to unexpected road closures. These advanced models are crucial for optimizing infrastructure investments, mitigating traffic bottlenecks, and ensuring the reliable operation of future transportation systems, ultimately impacting the livability and sustainability of cities worldwide.
Advancing the fidelity of mobility simulations demands a departure from agents that merely react to stimuli, towards those capable of genuine reasoning. This necessitates imbuing virtual actors with cognitive architectures that allow them to not only perceive their surroundings, but also to interpret information, formulate goals, and anticipate the actions of others. Such agents would move beyond pre-programmed responses, instead dynamically adjusting their behavior based on contextual awareness – considering factors like traffic density, pedestrian proximity, and even potential future events. By modeling these higher-order cognitive processes, simulations can more accurately reflect the complexities of human decision-making in real-world scenarios, paving the way for more robust predictions and effective urban planning strategies. Ultimately, the ability to simulate reasoning agents represents a critical step toward creating truly intelligent transportation systems.
Generative Traffic Agents: A New Paradigm in Simulation
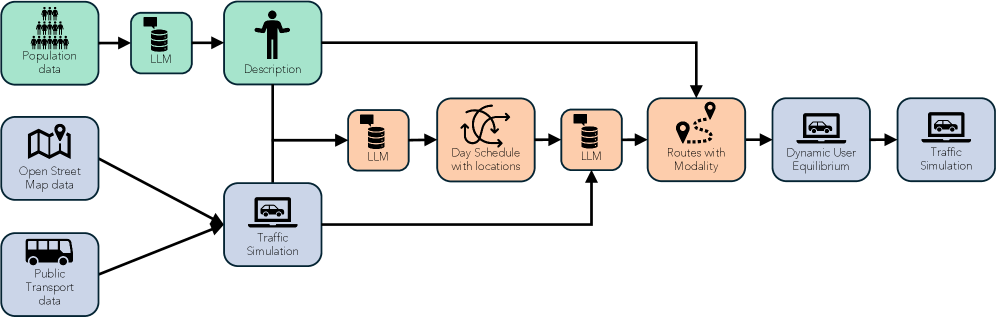
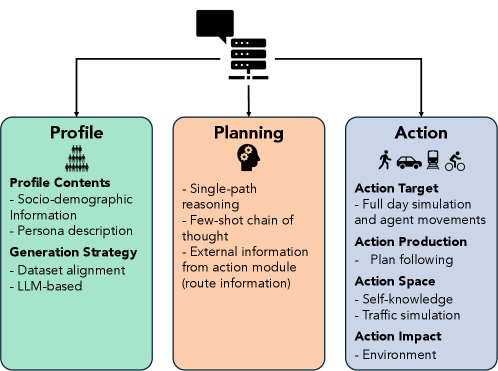
Generative Traffic Agents (GTA) represent a novel approach to mobility simulation built upon the foundation of census-aligned microdata. This method utilizes publicly available census information to establish statistically representative individual agent profiles, encompassing demographic characteristics and behavioral patterns. By grounding the simulation in real-world data, GTA aims to overcome limitations of traditional agent-based modeling which often rely on simplified or synthetic populations. The incorporation of microdata ensures that the generated agent behaviors reflect the distribution of characteristics within the target population, leading to increased fidelity and realism in the simulated environment. This data-driven approach allows for the creation of large-scale simulations that accurately represent population distributions and travel patterns.
Generative Traffic Agents (GTA) utilize Large Language Model (LLM) technology to construct individual agent behaviors within a simulation environment. These LLMs are employed to create persona-driven agents, meaning each agent is assigned a set of characteristics and preferences that influence its decision-making process. Crucially, these agents are capable of contextual reasoning; they do not simply react to immediate stimuli but can interpret environmental factors and adjust their actions accordingly. This is achieved by providing the LLM with relevant situational data, allowing it to generate responses based on both the agent’s defined persona and the surrounding context, thereby creating more realistic and adaptive behaviors.
Generative Traffic Agents (GTA) enhance simulation realism by integrating detailed individual agent profiles – encompassing demographic data, daily routines, and stated preferences – with real-time environmental inputs. These inputs include dynamic factors like traffic congestion, weather conditions, and points of interest. This combination enables agents to react to their surroundings in a contextually appropriate manner, moving beyond pre-programmed behaviors. The system doesn’t simply dictate movement; it allows agents to evaluate options based on their individual profiles and the current environmental state, resulting in emergent behaviors that more closely resemble those observed in real-world traffic patterns. This approach creates a simulation environment where agent actions are not solely determined by static rules but are dynamically influenced by both internal characteristics and external stimuli.
Traditional Agent-Based Modeling (ABM) typically simulates behavior based on pre-defined rules, offering limited insight into the reasoning behind agent actions. Generative Traffic Agents (GTA) address this limitation by utilizing Large Language Models to imbue agents with the capacity to generate explanations for their decisions. This is achieved through prompt engineering that requests justification alongside action selection, resulting in textual outputs detailing the agent’s rationale. Consequently, GTA simulations provide not only observed behaviors, but also interpretable justifications for those behaviors, enabling researchers to validate model assumptions, identify unexpected emergent patterns, and improve the overall trustworthiness of simulation results through increased transparency.
Validation and Accuracy: Grounding Simulation in Reality
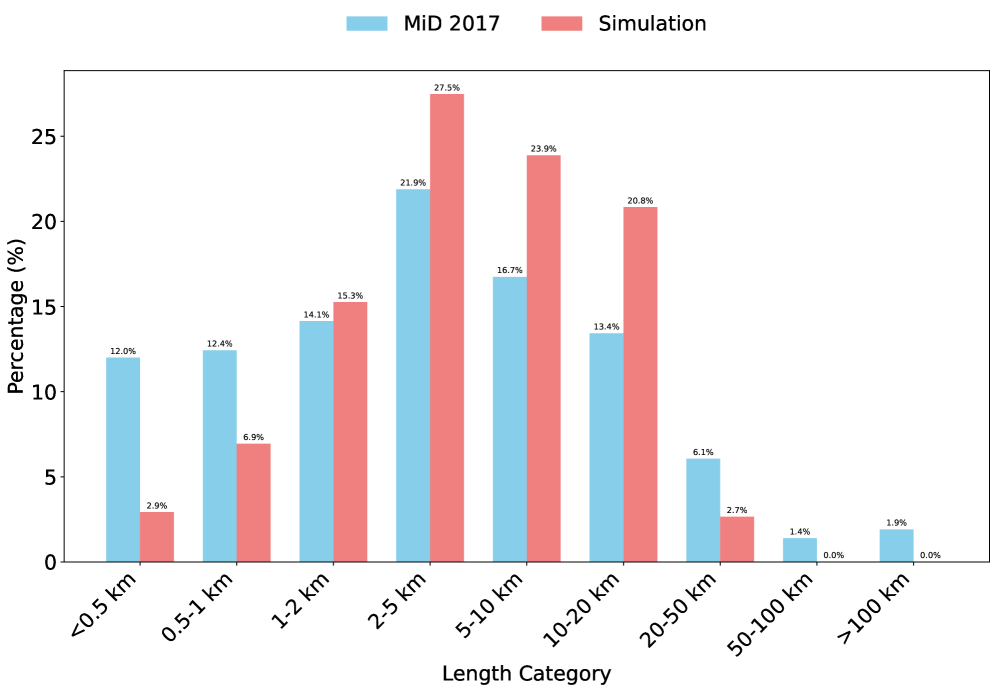
GTA simulation validation relies on the ‘Mobility in Germany 2017’ dataset, a comprehensive record of travel behavior within the country. This validation process quantitatively assesses the fidelity of the simulated environment by comparing key metrics derived from the simulation-such as modal split (the distribution of transportation modes used) and interregional travel durations and lengths-to the corresponding empirical data reported in the dataset. Rigorous comparison against this real-world data is crucial for establishing the accuracy and reliability of the GTA simulation as a platform for mobility research and analysis.
The integration of the Simulation of Urban MObility (SUMO) traffic simulation platform allows for detailed modeling of vehicle dynamics and network-wide traffic flow within the generated Grand Transportation Atlas (GTA) environment. SUMO facilitates the representation of individual vehicles, their interactions, and responses to varying traffic conditions. This integration enables the simulation of realistic traffic patterns, congestion effects, and the propagation of incidents through the network. Parameters within SUMO, such as speed limits, vehicle types, and driver behaviors, can be adjusted to reflect specific scenarios and sensitivities, contributing to the overall fidelity of the generated transportation data.
Within the GTA simulation framework, the integration of SUMO leverages Dynamic User Equilibrium (DUE) principles to model realistic agent behavior. DUE allows individual agents within the simulation to continuously reassess their routes based on perceived network congestion. This adaptive routing functionality ensures that agents do not rigidly adhere to predetermined paths, but instead dynamically select routes that minimize their individual travel time, considering the actions of all other agents in the system. The resulting emergent behavior more accurately reflects real-world traffic patterns, where drivers respond to changing conditions to optimize their journeys, leading to a more robust and credible simulation environment.
Quantitative validation of the generated traffic activity demonstrates a strong correlation with empirical data. When comparing simulated modal split-the distribution of transportation methods used-to observed survey data, GTA achieves a Root Mean Squared Error (RMSE) of 4.07. Analysis of interregional travel durations yields an RMSE of 6.07 for GTA, exceeding the average RMSE of 3.58 observed for other German states when using the same validation methodology. Furthermore, GTA’s RMSE for interregional travel length is 6.12, considerably higher than the 1.87 average RMSE reported for other German states, indicating a greater divergence in modeled distances.
Beyond Simulation: Implications for Intelligent Transportation
The capacity of Generative Traffic Agents (GTA) to articulate the rationale behind its actions – expressed in natural language – offers an unprecedented window into the complexities of driver behavior. Unlike traditional simulations that merely show a vehicle’s response, GTA reveals why a decision was made, detailing the perceived risks, predicted outcomes, and considered alternatives. This level of interpretability allows researchers to move beyond observing patterns to understanding the underlying cognitive processes that govern driving, potentially exposing previously unknown biases or inconsistencies in human decision-making. By translating complex algorithmic calculations into human-readable explanations, the framework facilitates a deeper analysis of factors influencing maneuvers like lane changes, speed adjustments, and responses to unpredictable events, ultimately enabling the development of more nuanced and human-aligned autonomous systems and improved traffic management strategies.
The capacity to understand why a simulated driver made a particular choice unlocks unprecedented opportunities for refining traffic systems. Traditional simulations often present only outcomes – congestion levels, accident rates – offering limited insight into the underlying causes. However, by providing natural language reasoning behind each agent’s actions, the framework enables analysts to pinpoint specific infrastructural flaws or ineffective traffic management protocols. For example, a simulation might reveal that a particular lane configuration consistently encourages aggressive merging, and the accompanying reasoning would detail the driver’s perceived risk and benefit calculation. This granular level of interpretability facilitates a targeted approach to improvement, allowing engineers to test “what if” scenarios with a deeper understanding of driver responses and ultimately design safer, more efficient roadways and smarter traffic control systems.
The Generative Traffic Agent (GTA) framework offers a uniquely robust platform for the iterative development and rigorous testing of autonomous driving algorithms. Unlike traditional simulations relying on pre-programmed scenarios, GTA’s capacity to dynamically generate complex and nuanced traffic situations-complete with human-like driver behaviors-creates a testing ground far closer to real-world conditions. This allows developers to evaluate algorithm performance across a broader spectrum of unpredictable events, identify edge cases previously unseen in controlled environments, and refine decision-making processes with unprecedented precision. The framework’s controlled nature also enables repeatable experiments and precise data collection, accelerating the validation process and ultimately contributing to the creation of safer and more reliable autonomous vehicle systems.
Grand Theft Auto’s detailed environments and realistic agent behaviors are increasingly recognized as a powerful bridge between the limitations of traditional traffic simulations and the complexities of real-world driving. This framework moves beyond simply predicting traffic flow; it allows for the modeling of nuanced human-like decision-making in response to dynamic conditions, offering a uniquely valuable testing ground for novel transportation solutions. Consequently, innovations in autonomous vehicle algorithms, adaptive traffic control, and infrastructure design can be rigorously evaluated – and refined – before implementation, promising substantial gains in road safety, reduced congestion, and a diminished environmental impact. By enabling proactive optimization and risk assessment, this approach facilitates the development of transportation systems that are not only smarter, but demonstrably more sustainable and resilient for future generations.
The pursuit of realistic mobility modeling, as demonstrated by Generative Traffic Agents, hinges on understanding the intricate web of individual behaviors and their collective impact. This echoes Blaise Pascal’s observation: “The whole is greater than the sum of its parts.” GTA doesn’t merely simulate vehicles; it constructs agents grounded in population data, allowing for emergent behaviors that a purely mechanistic approach would miss. The system’s strength lies in its holistic design, acknowledging that traffic flow isn’t simply a matter of optimizing routes, but of representing the nuanced decisions of a simulated population. Good architecture is invisible until it breaks, and only then is the true cost of decisions visible.
The Road Ahead
The pursuit of realistic agent behavior in simulation frequently devolves into elaborate systems of bespoke rules. This work, by grounding agents in the readily available, if imperfect, data of large language models, offers a subtly radical simplification. The elegance lies not in mimicking complexity, but in leveraging pre-existing knowledge. However, the fidelity of that knowledge remains a critical constraint. The current approach, while promising, inherits the biases and limitations inherent in the training data of the underlying language models-a problem not easily dismissed with further algorithmic refinement.
A natural progression involves exploring methods for grounding these generative agents in multimodal data – integrating visual and spatial information directly into the agent’s ‘understanding’ of its environment. This isn’t merely about adding detail; it’s about moving beyond textual representations and allowing the agent to ‘experience’ the simulated world. A truly robust system will need to move beyond simply reacting to stimuli and exhibit rudimentary forms of anticipation and planning, a capacity currently absent.
Ultimately, the value of such simulations rests not in their predictive power – predicting human behavior is a fool’s errand – but in their capacity to reveal unintended consequences. If a design feels clever, it probably is fragile. The true test will be whether this approach allows urban planners to identify vulnerabilities in mobility systems before they manifest in the real world, a task demanding not just realism, but a healthy dose of skepticism regarding the simulations themselves.
Original article: https://arxiv.org/pdf/2601.16778.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Top 20 Dinosaur Movies, Ranked
- 20 Movies Where the Black Villain Was Secretly the Most Popular Character
- Celebs Who Narrowly Escaped The 9/11 Attacks
- 25 “Woke” Films That Used Black Trauma to Humanize White Leads
- Gold Rate Forecast
- Spotting the Loops in Autonomous Systems
- Silver Rate Forecast
- 22 Films Where the White Protagonist Is Canonically the Sidekick to a Black Lead
- The 10 Most Underrated Jim Carrey Movies, Ranked (From Least to Most Underrated)
- The Best Directors of 2025
2026-01-27 00:23